Engel Algılayan Robot
Proje Yapım Malzemeleri
1 x Arduino Uno
1x Adafruit Motor Shield
1x HC-SR04 Ultrasonik Mesafe Sensörü
Robot şasesi için pertinaks, foto blok, fleksi table veya hazır basit robot şasesi.
4 adet dişi-erkek Jumper kablolar
4x 1.2v 2000 mAh (Ni-mh) yada 6x 1.5V kaliteli alkalin pil.
Kullanacağınız pil sayısına göre 4 lü veya 6 lı pil kutusu.
30:1 micro meta motor yada dişli kutulu motor.
4 adet motor miline uygun teker.
Sıcak silikon tabancası.
Muhtelif proje malzemeleri.




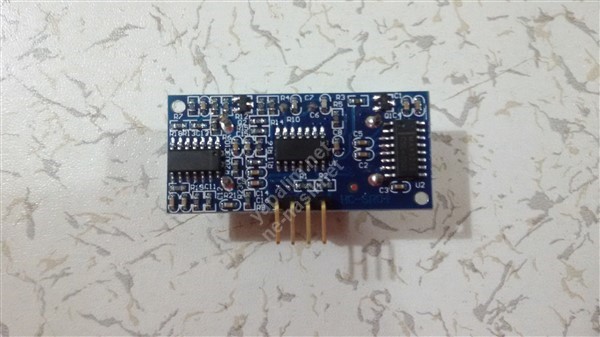



HC-SR04 Ultrasonik Mesafe Sensörü

HC-SR04 Ultrasonik Mesafe Sensörü: 2cm'den 400cm'ye kadar 3mm hassasiyetle ölçüm yapabilen bu ultrasonik sensör Robotumuzun yoluna çıkan engelleri fark ederek çıkış vermesini sağlamak içindir.Robotumuzun gözü olarakta düşüne biliriz.
Arduino UNO

Arduino UNO: Robotun ana kartıdır. Programlanacak mikro denetleyici üzerinde taşıyan kart. USB portu sayesinde bilgisayara bağlanarak programlanabilmektedir.
Arduino, Processing/Wiring dilini kullanarak çevre elemanları ile temel giriş çıkış uygulamalarını gerçekleştiren açık kaynaklı fiziksel programlama platformudur. Arduino ile bağımsız olarak interaktif uygulamalar gerçekleştirilebilirsiniz. Aynı zamanda Arduinoyu bilgisayar ile Flash, Processing, MaxMSP, C Sharp gibi bir çok yazılım üzerinden yada kendi yazdığınız yazılımlarla haberleştirerek de kullanabilirsiniz. Açık kaynaklı arayüz yazılımını internet sitesinden Windows, Mac OS X ve Linux platformları için indirebilirsiniz.
Adafruit Motor Shield

Adafruit Motor Shield: Arduinoya üstten bağladığımız motor sürücü kartı. DC,Servo ve Step Motor kontrolü yapılmaktadır. Bu çalışmada 2 adet motor kontrol edilecektir.
Arduino motor sürücü shieldi, Arduino üzerine takılarak 4 DC motoru veya 2 step motoru (unipolar veya bipolar) ve de en az 2 servo motoru kontrol etmenize imkan sağlayan bir karttır.
Kart üzerinde 2 adet L293D motor sürücü entegresi mevcuttur. Bu entegreler içerisinde toplam 4 adet H köprüsü bulunur. Her bir köprü üzerinden 0,6A akım akmasına imkan vermektedir. (Anlık 1,2A)
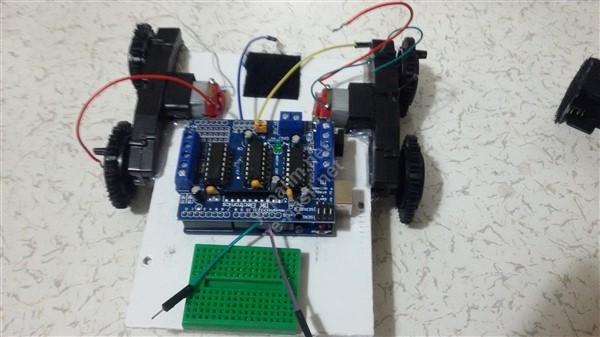
Teker Kısmının Hazırlanması






İlk olarak arkadaşlar motor ve teker millerini birleştiriyoruz. Biz bu projemizde piyasada hazır satılan dişli kutulu oyuncak arabaların teker kısmını kullandık. Arabanın sökülme ve hazırlanma kısmını sizlerle daha önce ışık takip eden robot projemizde ayrıntılı olarak BURADA paylaştığımız için tekrar kalabalık olmasın diye yazmıyorum.
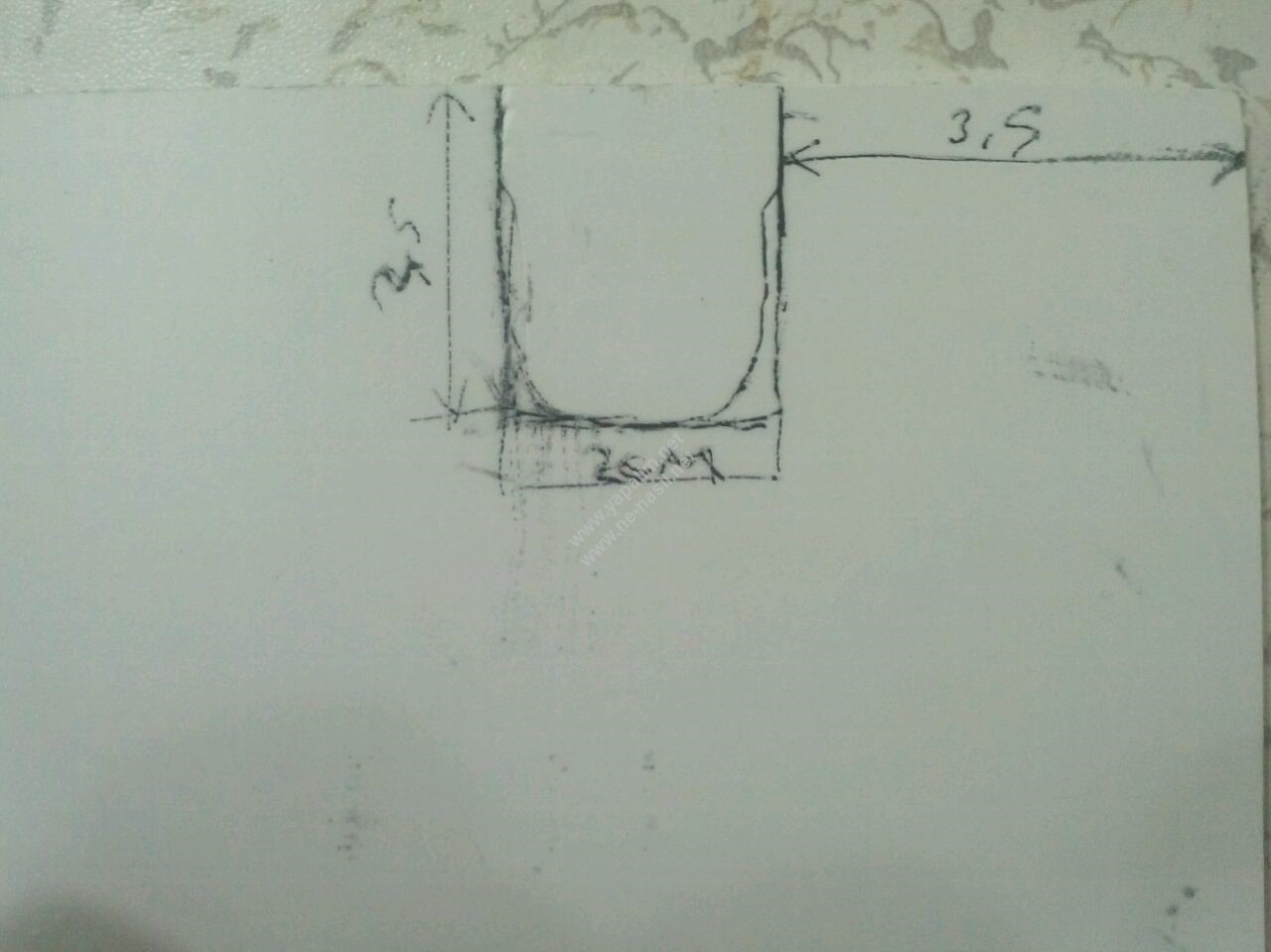
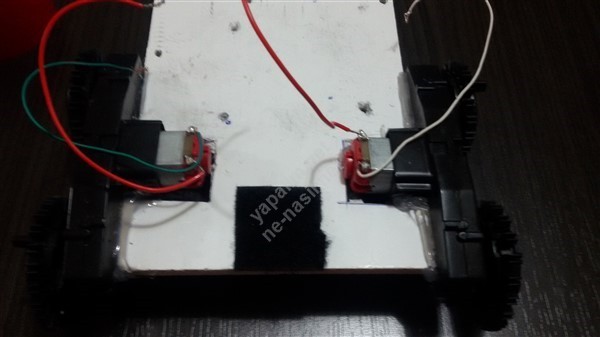
Şimdi ise arkadaşlar şase kısmını hazırlıyoruz. Projemizde şase malzemesi olarak foto blok kullandık. Motor,tekerler ve dişli mil kısmına göre uygun ölçülerde 10*13 cm ölçülerinde bir parça kesiyoruz.
Kestiğimiz parçanın arka kısmına motor gövdesini montaj etmek için 2*2,5 cm ölçülerinde parçalar kesip sıcak silikon ile tekerleri gövdeye montaj ediyoruz. Ben robotun ön kısmında sarhoş tekerlerden kullanmadım. Onun yerine dört tekeri taktım. Görünüm açısından daha hoş oldu.



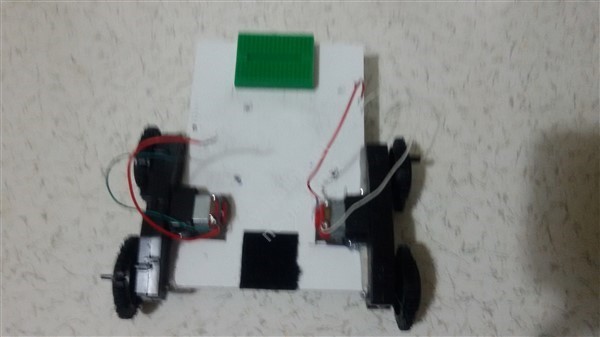
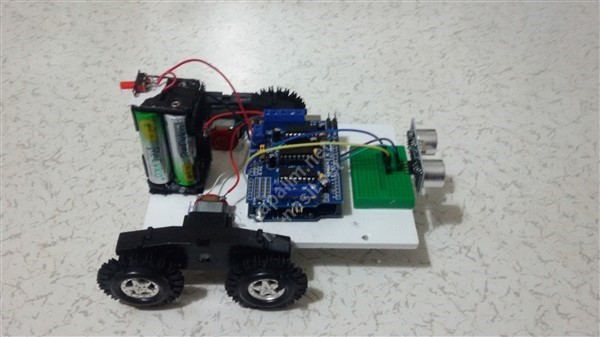
Pil olarak 4 adet pil kullanacaksanız 4 lü pil tutucuyu robotun arka kısmına resimde görüldüğü gibi sıcak silikon ve hızlı yapıştırıcı ile yapıştırabilirsiniz. Yapıştırmayı terzilerden alacağınız cırt-cırt kullanarak yaparsanız pil takma ve çıkarma işlemlerinde karşılaştığınız sorunları minimize edebilirsiniz. 6 adet pil kullanacak arkadaşlar ben 6 lı pil tutucu bulamadım. 3 tane 2li veya 4+2 pil tutucu kullanabilirsiniz. Ben robot tasarımında ön sol kısmında 2 pil tutucu için boş yer bıraktım. Alt kısıma uygun matkap ucu ile kartı monte etmek için delik açıp kartı vida ile sıkıca monte ediyoruz.





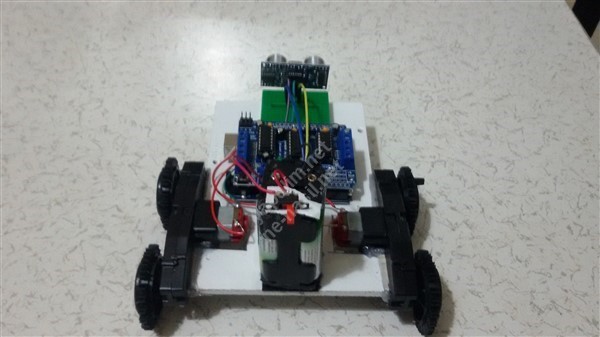
Arduino UNO ve HC-SR04 Ultrasonik Mesafe Sensörü Bağlantısı
Sensör üzerindeki bağlantı uçlarını kartımız üzerindeki ilgili pin deliklerine bağlıyoruz.
Kart üzerine havya ile ısıl bir müdahalede bulunmamak için bağlantı için mini board kullandım. Sizlere de şiddetle tavsiye ederim.


Şimdi ise arkadaşlar motor sürücü kartını uno kartın üstüne montaj ediyoruz. Dikkatli bir şekilde....



Arkadaşlar motor bağlantılarını yaparak robotun mekanik aksam çalışmalarını bitiriyoruz.
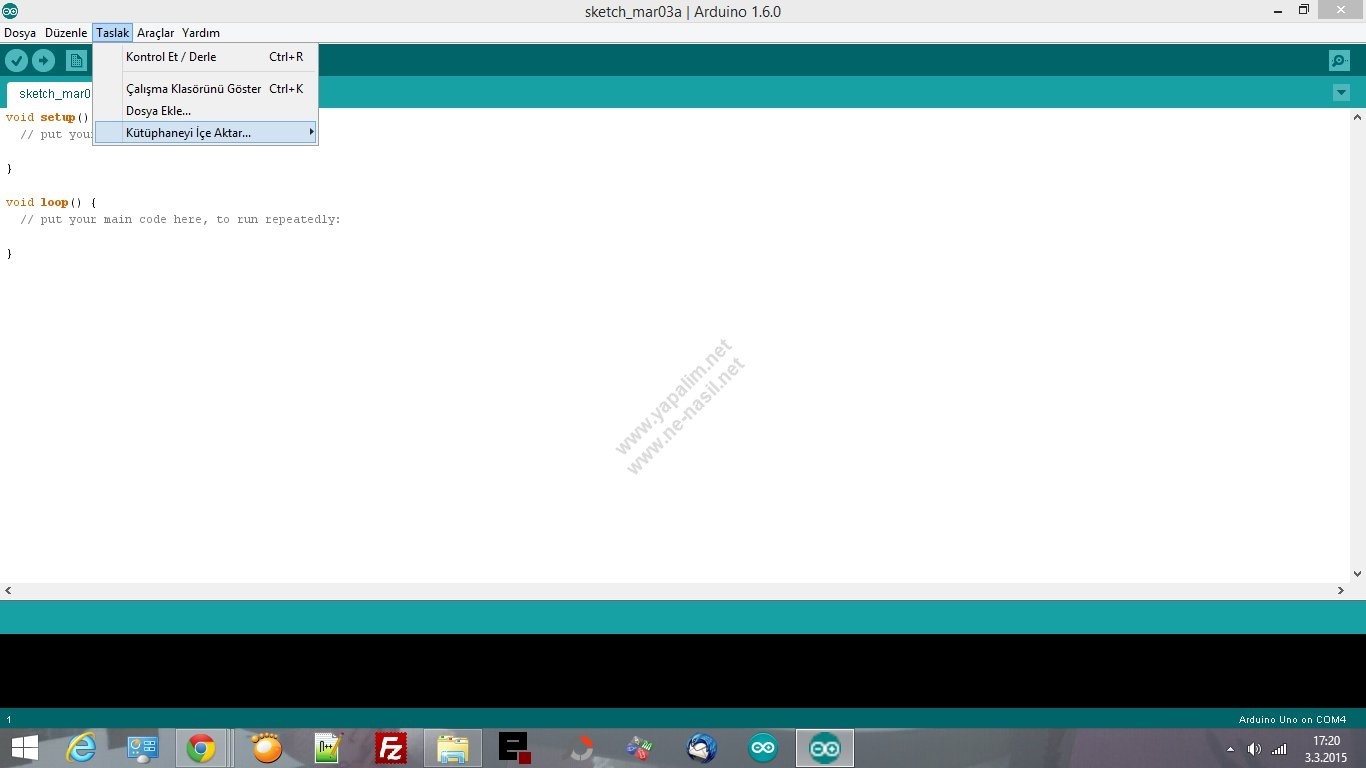
Adafruit Motor Shield Kütüphanesinin Yüklenmesi
BURADAN indirdiğimiz zip dosya formatlı Adafruit Motor Shield kütüphane dosyasını sarı klasör haline getirip ismini AFMotor yapıyoruz.
AFMotor içinde AFMotor.cpp ve AFMotor.h dosyaları olup olmadığını kontrol edin. Değilse, yukarıdaki adımları kontrol edin.
Daha sonra Bu klasörü kopyalayıp Arduino kütüphanelerinin bulunduğu dosya içerisine yapıştırıyoruz. Genellikle (C:\Program Files (x86)\Arduino) yada Belgeler/Arduino/Libraries klasöründe olur.
Bu işlemden sonra Aruino programını açtığınızda kütüphaneler kısmında AFMotor ismini görmeniz gerekmektedir.




Arduino Programının Yüklenmesi

Arduino programını açıp ekranda çıkan bütün komutları siliyoruz. BURADAN indirdiğimiz kodu kopyalayıp ekrana yapıştırıyoruz. Robotu USB kablo ile PC ye bağlayıp kodları kartımıza YÜKLE (upload) ikonuna basarak yüklüyoruz.
Robot programı geliştirmeye açıktır. Kod üzerinde bulunan zaman ve hız değerlerini kullanacağınız motor ve platforma göre düzenleyip robotun daha hassas,hızlı ve verimli çalışmasını sağlayabilirsiniz.
Robotun Çalıştırılması

Açma-kapama düğmesini açarak robota güç veriyoruz. Robot hareket etmeye başlayacaktır. Sensör önüne 2 cm mesafeden engel geldiği zaman yön değiştirip hareketine devam edecektir.
Muhtemel Sorun ve Çözümler
Robot hiç çalışmıyor?
Pil bağlantılarını ve motor kartı üzerindeki girişi kontrol ediniz.
Robot geri gidiyor?
Motor bağlantı uçlarını ters çevirin.
Motorlar çalışıyor ama robot hareket etmiyor?
M1 ve M3 bağlantı yeri ile motor bağlantı uçlarını değiştirin.
Motor sürekli tek yönde dönüyor?
Sensör güç bağlantılarını kontrol edin.








Yazılımlar
ARDUİO 1.6.5 (JUST DOAWLOAD ücretsiz indir)
(www.yapalim.net)